|
|
|
 |
This is Chris showing off his sparkly new
bench drill. At last we can vertically drill stuff without it going in
at an angle. This will be essential to the development of R2, but here
he is working on part of MPM. Can you guess what it is? |
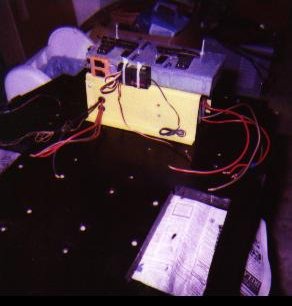
| Now, before you get too excited, this is
a partly re-built Panda. This was done post-Wales. The speed controller
housing is mounted in the same place, but has been improved. The servo
mount (on the top) will be replaced with rotary pots shortly, but until
the running gear is going, we'll stick with the old one. Note the orange
failsafes children! |
 |
 |
And this is a further progression. The
motors are in place and the 2.5mm steel plate is ready for the new wheel
mountings. This system may well be transfered to R2 in due course - there
is no point re-inventing the wheel. |
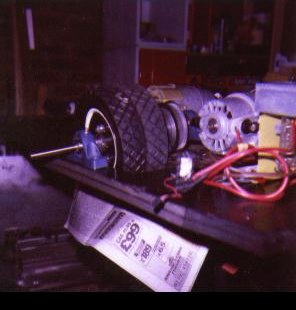
| This is the first picture of the new wheel
assembly. There are now 3 bearings per wheel and each wheel uses 2 tyres
bolted to steel plating. The drive is still belt, only now giving about
16:1 ratio. At 24V, this should pack a bit more of a punch and make the
Panda much more controllable, but without losing the speed. Once the second
assembly is complete, we can go ahead and re-build Panda for a test drive. |
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|