Another update - I hope you're prepared for many fails.

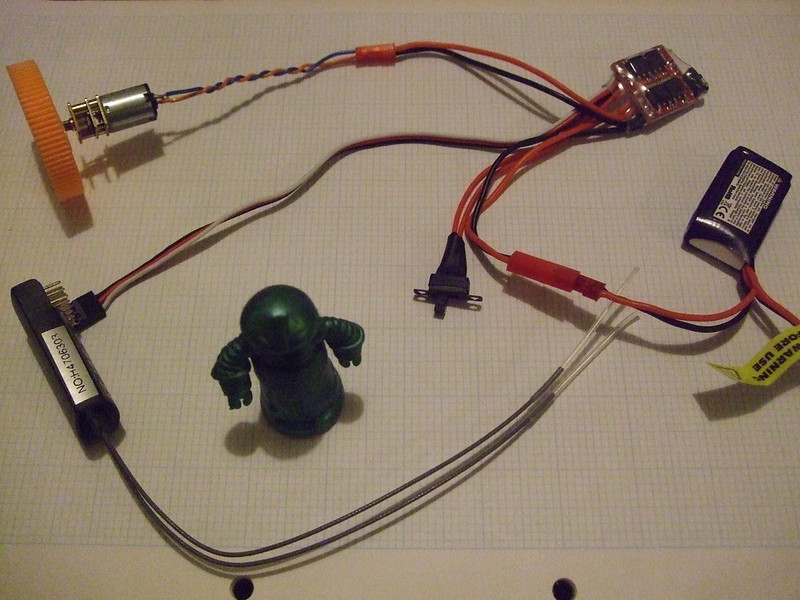
I soldered the two Bustophedons together to share power lines and whatnot. I hoped that getting rid of some of the wires would reduce the weight a bit. It barely changed! Together, they weigh about 20g, which is kinda heavy. Might do the job if I make a pushbot or something.
I then tried the NanoTwo. er.. it seems my research has been as rubbish as usual. I could've sworn I'd seen advice saying that a FlySky i6 would work with a DSM receiver, and there was even advice saying to not buy a certain version because that won't work. Well, it doesn't ruddy work, and I can't find the advice that I'd previously found. Was it a dream I had? Maybe. New tx required, it was between an OrangeRX T6 and a Devo 7E. The Devo seemed more flexible, and was £10 cheaper, but the T6 is transparent orange!!! In the end, I went for the Devo, but deep down I think I still want a T6, just for the colour.

This also means I'll have a TX that my son can use, altho he's so obsessed with spinnahs that I'm not sure he'd be happy with the safety-conscious bot that I'm likely to give him.
My first robot plan was to build a lifter, but the plan called for a 180 degree servo. My MG90S only goes 90 degrees, but I found a youtube video about converting it to 180 that seemed simple enough. Just add two 2k2 resistors! easy!

So, I did the deed and plugged it into the servo tester. Powered it up and the servo went into overdrive and jammed. Nadgers! A bit of wiggling by hand freed it up, but it had broken a plastic washer thing inside the gear mechanism. Maybe a limiter that stops it going beyond 180 degrees? I powered it up again, with the resistors shorted out to return it to 90 degree rotation, but the motor just went round in one direction, ignoring the input signal. New servos ordered. Good job they're cheap! ooh, and my soldering's improving!
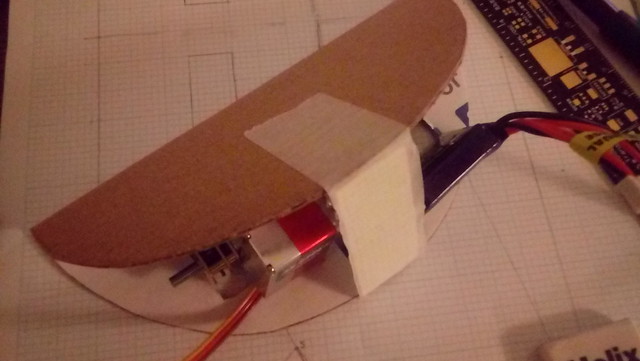
So, no NanoTwo until the TX arrives, I'm reserving the pink servo for the NanoTwo, and I killed my only other servo. Ignoring the 10:1 motors for now, it looks like my first bot will be a fairly basic pusher. I'm going to try and make it a bit unusual, if I can.
Soz for the wall of text!