Hi,
Thought I'd start a build diary to share how my build is progressing. I've been try to build a ring spinner and had the first (successful) drive and weapon test today:
http://youtu.be/qED5kV-JtlM
Sorry for the poor video, I had to film and drive the robot at once which is tricky when there is no indication of which way is forwards and the controls are the wrong way round so left and right is forwards and backwards!
For the time being all the electronics is taped on the top and it's running off 2 separate batteries but eventually it will just run off one. It will also be given some sort of teeth once I've got it all working. As you can see the gyro forces are significant and when the spinner spins up the whole robot spins in the other direction until it gets up to speed.
Let me know if you have any comments or suggestions!
Team MedBots
Moderators: BeligerAnt, petec, administrator
-
AntRoboteer
- Posts: 441
- Joined: Mon Mar 03, 2014 7:01 pm
Re: Team MedBots
Wow! Looks awesome! Can't wait to see what you end up with. Are you planning to enter it at Reading?
Re: Team MedBots
Yeah that's the plan. Plenty of time between now and then to refine it!
Thinking of the name 50/50 as in each fight it will have a 50% chance of throwing its opponent out and a 50% chance of throwing itself out!
Thinking of the name 50/50 as in each fight it will have a 50% chance of throwing its opponent out and a 50% chance of throwing itself out!
-
peterwaller

- Posts: 3213
- Joined: Fri Feb 15, 2002 12:00 am
- Location: Aylesbury Bucks
- Contact:
Re: Team MedBots
I found on my one if you open the throttle quickly the robot rotates in the opposite direction.
How are you supporting the ring I found that mine disengaged from the bearings on some big hits at Antfreeze.
I think there is to much flex my bearings are only mounted on 2 mm screws on a 1.5mm ABS base.
I now have the proper v ballraces which have 3mm holes so with bigger screws and a stiffer mounting plate I hope to eliminate that on the next version.
How are you supporting the ring I found that mine disengaged from the bearings on some big hits at Antfreeze.
I think there is to much flex my bearings are only mounted on 2 mm screws on a 1.5mm ABS base.
I now have the proper v ballraces which have 3mm holes so with bigger screws and a stiffer mounting plate I hope to eliminate that on the next version.
-
Remote-Controlled Dave
- Posts: 3716
- Joined: Sun Apr 03, 2005 5:30 pm
- Location: Antrim, Northern Ireland
- Contact:
Re: Team MedBots
nice work, dont want to face that in the arena
Re: Team MedBots
Thanks guys.
@Peter: yeah it would probably help if I accelerated slower but it takes a lot of oomph to get it going! I took some pictures to try and show how the ring is held, basically I made up some peices of nylon with a shoulder at the top and bottom to hold the ring, then this bearing/bush spins on a nylon shaft. I think I'll remake the bearing/bush things though with a larger shoulder to try and stop the ring coming off.
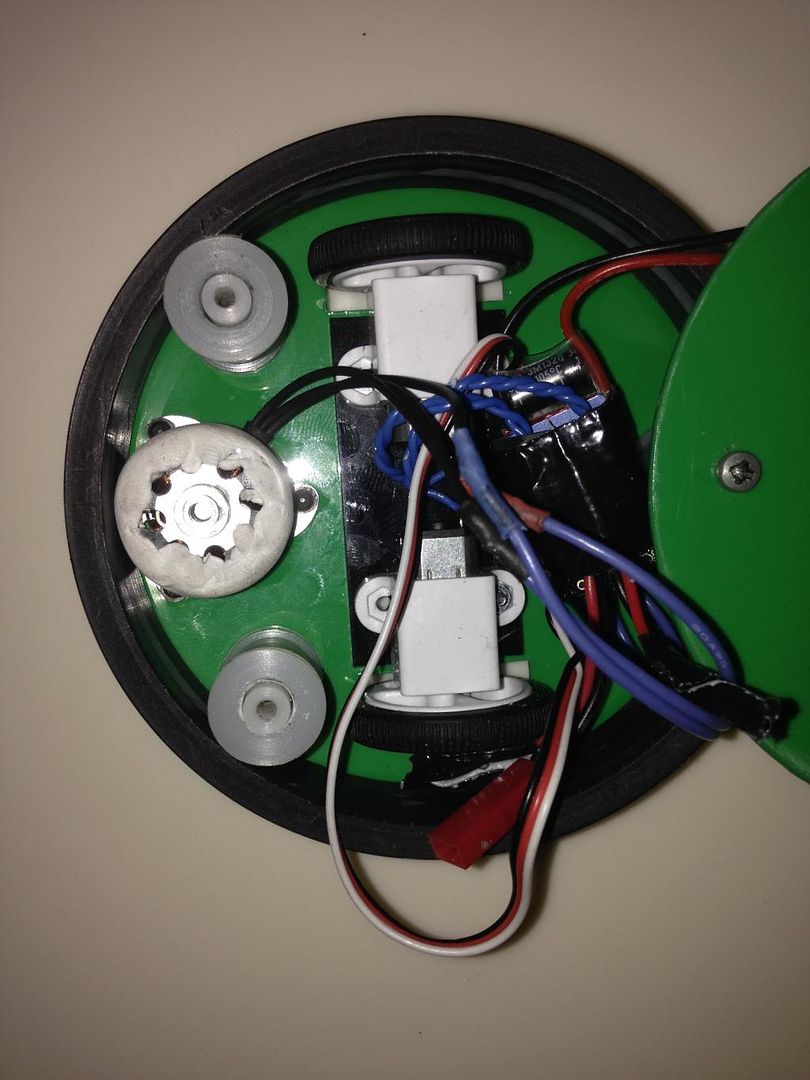
@Peter: yeah it would probably help if I accelerated slower but it takes a lot of oomph to get it going! I took some pictures to try and show how the ring is held, basically I made up some peices of nylon with a shoulder at the top and bottom to hold the ring, then this bearing/bush spins on a nylon shaft. I think I'll remake the bearing/bush things though with a larger shoulder to try and stop the ring coming off.

-
Remote-Controlled Dave
- Posts: 3716
- Joined: Sun Apr 03, 2005 5:30 pm
- Location: Antrim, Northern Ireland
- Contact:
Re: Team MedBots
Ahh, so its friction driven? I thought about doing that
Die Gracefully Robotics
Winner - AWS 39
Winner - AWS 39
Re: Team MedBots
Yeah it's just a friction drive.
Two questions:
- the shaft on my brushless keeps falling out the end! It looks like it has a pair of holes from grubscrews but I can't find any screws that fit it, seems to be somewhere between m3 and m2. Anyone know how I can stop the shaft coming out?
- I've got one of Rory's kits which came with the motors already soldered on bit at the moment forwards is left and left is forwards etc. is there an easy way to fix this or do I have to solder the wires on one of the motors the other way round?
Two questions:
- the shaft on my brushless keeps falling out the end! It looks like it has a pair of holes from grubscrews but I can't find any screws that fit it, seems to be somewhere between m3 and m2. Anyone know how I can stop the shaft coming out?
- I've got one of Rory's kits which came with the motors already soldered on bit at the moment forwards is left and left is forwards etc. is there an easy way to fix this or do I have to solder the wires on one of the motors the other way round?
-
AntRoboteer
- Posts: 441
- Joined: Mon Mar 03, 2014 7:01 pm
Re: Team MedBots
Have you tried reversing channels on your transmitter? That usually works for me.