The HPXF servo has just let us down for the first time ever. It doesn't seem to be able to cope with the more efficient system in the new Spark and so has decided to strip it's gears. That is a problem because of three reasons:
1 - The welded shell will need tearing apart to get it out.
2 - The bulkheads have been cut out to hold the HPXF and have been welded in.
3 - There isn't a metal geared version to replace it with.
The reason we welded it in was because we never really expected this to happen. I know others have had this issue but for us theses servos have been fantastic. The one in Flame has been running since probably around 2008 without any signs of wear.
So, has anyone got any recommendations of what to replace it with? The HS82-MG seems to be the next best option, but having seen other ants using them, I'm not very impressed with the power they give to the flipper and ideally we don't really want to decrease the power. Weight isn't really an issue as I've still got 16g to play with.
Invadants
Moderators: BeligerAnt, petec, administrator
-
Team Invade

- Posts: 106
- Joined: Wed Nov 10, 2010 7:13 pm
- Contact:
Re: Invadants
Website | YouTube | Photobucket | Build Diary
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion
Re: Invadants
Can you get the servo case off without ripping the robot apart? I have a fair few spare gears for HPXF's if you want some replacements.
-
Team Invade
- Posts: 106
- Joined: Wed Nov 10, 2010 7:13 pm
- Contact:
Re: Invadants
No, unfortunately some of the case would have to be ripped off anyway.
Even if we replaced the gears, I would think that it would simply strip them again after a little bit of use. Thanks very much for the offer though.
Even if we replaced the gears, I would think that it would simply strip them again after a little bit of use. Thanks very much for the offer though.
Website | YouTube | Photobucket | Build Diary
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion
-
joey_picus

- Posts: 1137
- Joined: Tue Jan 13, 2009 1:51 pm
- Location: Lancaster, Lancashire
- Contact:
Re: Invadants
The power (well, torque) of the HS82-MGs has never really been a problem for me, in fact I've found that they effectively have more power as you worry less about stripped gears - having said that though, running them at 7.4v does seem to be a problem if the servo is subject to repetitive mechanical stress (Jigsaw's "self" "righting" being unfortunately a good example XD)
They are slightly slower at the same voltage than the HPXF though, which I think causes the percieved drop in flipper power - this should be fixable by fiddling with the flipper geometry as that's as much a determinant of the flipper's speed (is that a word?) as the servo is. Looking at the way the linkage is arranged though, getting much more speed out of it might be a challenge...hopefully you can get it fixed though, I like Spark a lot!
They are slightly slower at the same voltage than the HPXF though, which I think causes the percieved drop in flipper power - this should be fixable by fiddling with the flipper geometry as that's as much a determinant of the flipper's speed (is that a word?) as the servo is. Looking at the way the linkage is arranged though, getting much more speed out of it might be a challenge...hopefully you can get it fixed though, I like Spark a lot!
Joey McConnell-Farber - Team Picus Telerobotics - http://picus.org.uk/ - @joey_picus
"These dreams go on when I close my eyes...every second of the night, I live another life"
"These dreams go on when I close my eyes...every second of the night, I live another life"
-
Team Invade
- Posts: 106
- Joined: Wed Nov 10, 2010 7:13 pm
- Contact:
Re: Invadants
Thanks Joey 
It's the speed more than anything that it needs. As long as it's got a reasonable amount of torque, it needs to have quite a high speed to throw something into the air, and I want it to be more of a flipper than a lifter! Before it stripped the gears it flipped Gust and it did a somersault through the air before landing (with a fully charged battery), and could flip it clean over an 8cm side wall with just one flip, and that is something I don't really want to lose.
We've ordered a metal-geared servo which appears to have just as good (if not better) stats so I'll see how that does.
It's the speed more than anything that it needs. As long as it's got a reasonable amount of torque, it needs to have quite a high speed to throw something into the air, and I want it to be more of a flipper than a lifter! Before it stripped the gears it flipped Gust and it did a somersault through the air before landing (with a fully charged battery), and could flip it clean over an 8cm side wall with just one flip, and that is something I don't really want to lose.
We've ordered a metal-geared servo which appears to have just as good (if not better) stats so I'll see how that does.
Website | YouTube | Photobucket | Build Diary
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion
-
Team Invade
- Posts: 106
- Joined: Wed Nov 10, 2010 7:13 pm
- Contact:
Re: Invadants
Started/completed one of the fleas this weekend




Decided to produce a fleaweight version of Gust, and the results seem promising. It runs off two 300rpm eBay motors, so it's not great at the moment in terms of speed, but on the plus side it does have plenty of pushing power. I'll probably upgrade to some HP motors after the AWS. It has four 80mah 'round' turnigy nano-tech cells, effectively meaning it runs off a 2 cell 160mah lipo, which keeps it running for quite a while. On top is an orange RX with the case and pins removed, and wires soldered on directly, and next to each motor is a HPXF servo board, which gives it surprisingly good control. The gear mechanism works well, but are starting to wear a bit, so I'm hoping they're just wearing in. If not, they will last for a while and are easy enough to replace, so that isn't much of a problem. The armour is 1mm HDPE on the top and bottom, 2mm HDPE around the sides and 1mm titanium on the front. The HDPE is welded together to make it nice and tough, and the front is separate and can be removed to allow charging. As you can see it's quite a way underweight should I want to make any improvements, but apart from upgraded motors we'll have to wait and see what goes wrong (if anything ). This is mostly because it's so tiny (would fit in the 3" cube flat without acetate), it looks minuscule compared to Gust which is pretty small itself. Was a challenge to fit all the parts in.
). This is mostly because it's so tiny (would fit in the 3" cube flat without acetate), it looks minuscule compared to Gust which is pretty small itself. Was a challenge to fit all the parts in.
Weight: 66.5g
Armour: 1mm HDPE, 2mm HDPE & 1mm Titanium
Weapon: Pusher
Speed Controller: 2x HPXF servo boards
Batteries: 4x Turnigy Nano-Tech 80mahmAh 1C Lipos (2C, 160mah)
Reciever: Orange RX
Drive Motors: 2x 300rpm eBay motors
Wheels: 16mm x 5mm Scalextric 'copy' tyres with 3D printed hubs
Length: 72mm (81mm with acetate)
Width: 74mm
Height: 15mm
Decided to produce a fleaweight version of Gust, and the results seem promising. It runs off two 300rpm eBay motors, so it's not great at the moment in terms of speed, but on the plus side it does have plenty of pushing power. I'll probably upgrade to some HP motors after the AWS. It has four 80mah 'round' turnigy nano-tech cells, effectively meaning it runs off a 2 cell 160mah lipo, which keeps it running for quite a while. On top is an orange RX with the case and pins removed, and wires soldered on directly, and next to each motor is a HPXF servo board, which gives it surprisingly good control. The gear mechanism works well, but are starting to wear a bit, so I'm hoping they're just wearing in. If not, they will last for a while and are easy enough to replace, so that isn't much of a problem. The armour is 1mm HDPE on the top and bottom, 2mm HDPE around the sides and 1mm titanium on the front. The HDPE is welded together to make it nice and tough, and the front is separate and can be removed to allow charging. As you can see it's quite a way underweight should I want to make any improvements, but apart from upgraded motors we'll have to wait and see what goes wrong (if anything
Weight: 66.5g
Armour: 1mm HDPE, 2mm HDPE & 1mm Titanium
Weapon: Pusher
Speed Controller: 2x HPXF servo boards
Batteries: 4x Turnigy Nano-Tech 80mahmAh 1C Lipos (2C, 160mah)
Reciever: Orange RX
Drive Motors: 2x 300rpm eBay motors
Wheels: 16mm x 5mm Scalextric 'copy' tyres with 3D printed hubs
Length: 72mm (81mm with acetate)
Width: 74mm
Height: 15mm
Website | YouTube | Photobucket | Build Diary
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion
-
Remote-Controlled Dave
- Posts: 3716
- Joined: Sun Apr 03, 2005 5:30 pm
- Location: Antrim, Northern Ireland
- Contact:
Re: Invadants
That's pretty incredible! Can't wait to see it at the AWS
Die Gracefully Robotics
Winner - AWS 39
Winner - AWS 39
Re: Invadants
That's insane. I can barely get LD in weight and you manage that inside 67g ? I need to change build techniques  .
.
-
Team Invade
- Posts: 106
- Joined: Wed Nov 10, 2010 7:13 pm
- Contact:
Re: Invadants

Ready for a quick test at Maidstone this weekend (if I get the time
Website | YouTube | Photobucket | Build Diary
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion
-
Team Invade
- Posts: 106
- Joined: Wed Nov 10, 2010 7:13 pm
- Contact:
Re: Invadants
Half term at last The race is on to get 7 robots finished, of which only two are currently complete 
To show you all the (little) progress:
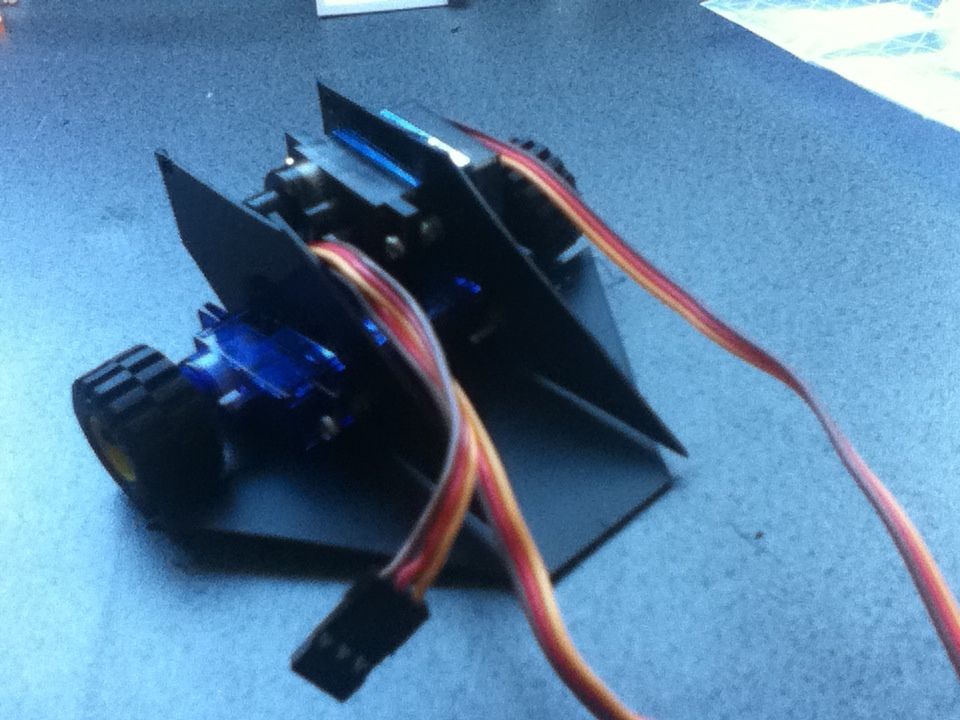
The start of a flea weight Explosion. I think the weight is going to be tight. Currently I've got a 0.5mm aluminium flipper made but I hope to upgrade that if weight allows, as I don't fancy it's chances against spinners.
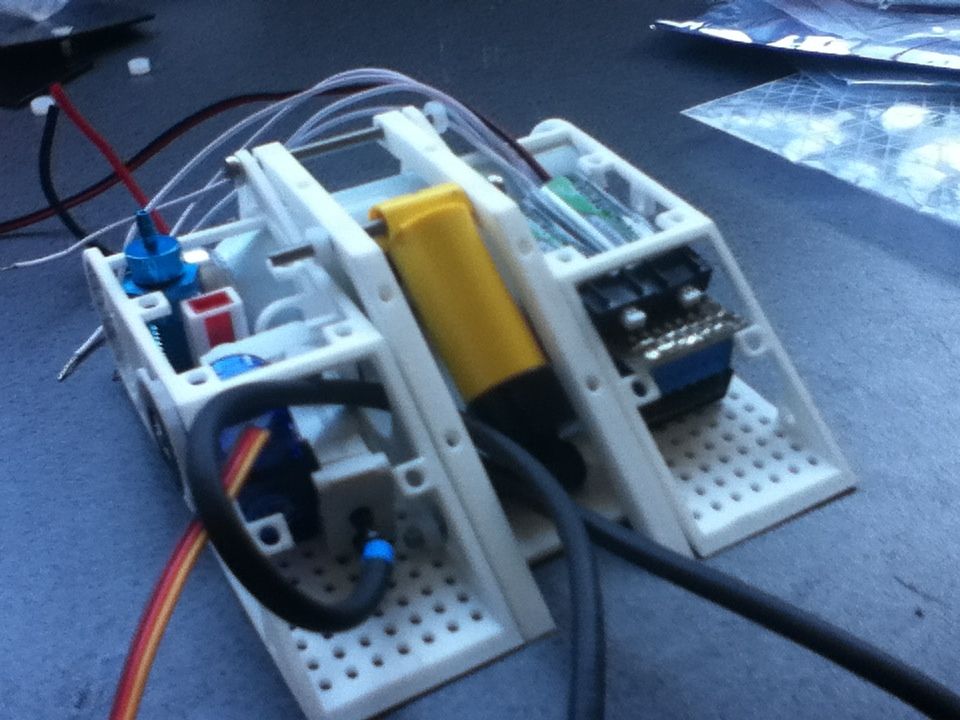
All the bits crammed into the pneumatic robot. I didn't have a clue how it was going to fit in before Dave reminded me about it earlier It's quite tight because it now uses an RS valve and SG50 servo since I'm very unimpressed with the flow the Parker valves give.
And now time for a bit of rule clarification/manipulation
As some of you may notice I currently have four rollers (well, I hope I do once they're all finished ), and preferably I wanted to enter all four, I was planning to make a small Alsoran-style cluster to go with one of them. However, this became a bit of a problem once I realised that the lowest weight I had was this:

...meaning that I have a grand total of 15.41g to make a cluster out of, and my parts weigh a total of:
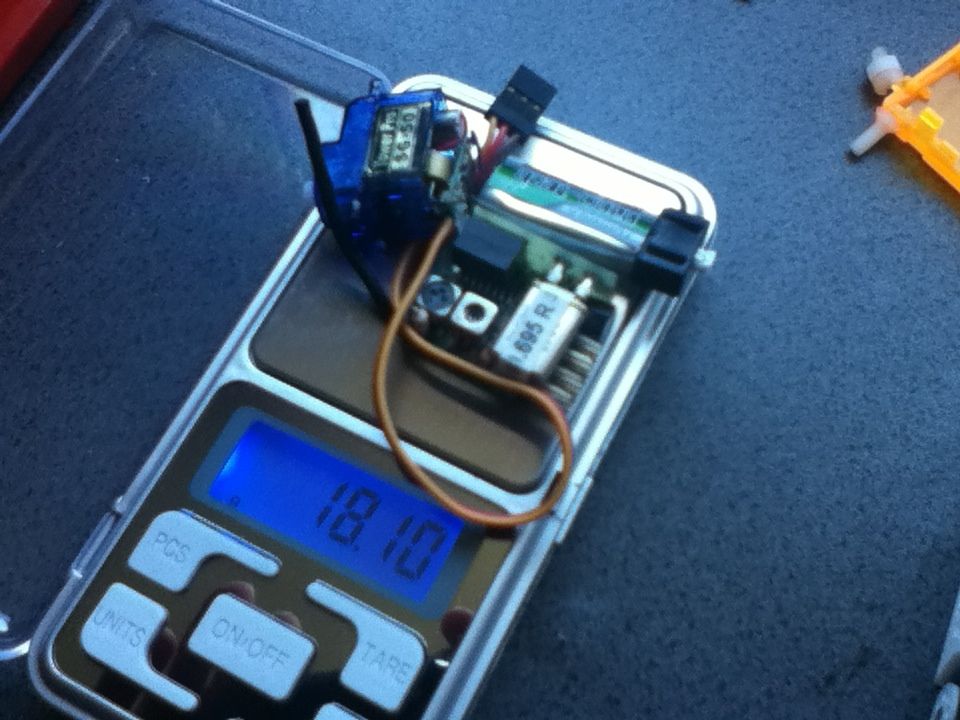
... which is the reason that I came up with this idea:
If I use the 15.41g to make a cluster botlet which is a walker, it can weigh up to 23.115g. This allows me to make a small cluster with one useless walking paddle which technically moves it. It'll be completely useless and will do nothing more than going round in circles but technically will count as the other half of the cluster, and will be in weight with it's new weight limit of 157.706g. Am I correct?
*crosses fingers*
To show you all the (little) progress:
The start of a flea weight Explosion. I think the weight is going to be tight. Currently I've got a 0.5mm aluminium flipper made but I hope to upgrade that if weight allows, as I don't fancy it's chances against spinners.
All the bits crammed into the pneumatic robot. I didn't have a clue how it was going to fit in before Dave reminded me about it earlier
And now time for a bit of rule clarification/manipulation
As some of you may notice I currently have four rollers (well, I hope I do once they're all finished
...meaning that I have a grand total of 15.41g to make a cluster out of, and my parts weigh a total of:
... which is the reason that I came up with this idea:
If I use the 15.41g to make a cluster botlet which is a walker, it can weigh up to 23.115g. This allows me to make a small cluster with one useless walking paddle which technically moves it. It'll be completely useless and will do nothing more than going round in circles but technically will count as the other half of the cluster, and will be in weight with it's new weight limit of 157.706g. Am I correct?
*crosses fingers*
Website | YouTube | Photobucket | Build Diary
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion
Featherweight UK Champion
Heavyweight Robot Wars Champion
Heavyweight Tag Team Champion
Featherweight Tag Team Champion