Autonomous Rules
Moderators: BeligerAnt, petec, administrator
-
Remote-Controlled Dave
- Posts: 3716
- Joined: Sun Apr 03, 2005 5:30 pm
- Location: Antrim, Northern Ireland
- Contact:

I don't really see a reason to give the extra weight advantage to autonomous ants. If they can be made under 150g, then they should have to stick to it. It's just another excuse to try and cheat the weight limit. I know 75g doesn't seem much, but it can make a huge difference to a roller. If autonomous ants want to compete, they should be real ants, 150g. If it's not 150g, its not an ant (unless it s a walker  )
)
-
Adam Hargreaves
- Posts: 223
- Joined: Sat Apr 30, 2005 9:25 am
- Location: Loughborough
- Contact:
well, considering mine is a simple one, it still requires 5 Ultrasonic transducers, 3 line sensors and 3 different PCBs. And that's without it attempting to work out the difference between an arena wall and another robot.
Granted I'm using bodged SD200s and a 30g NiMH pack, so they could maybe save 20g or so...
And I'm sure walkers cuold be made for the 150g weight too, but they get extra weight for being abnormal, so why not allow extras for autonomous ones?
Granted I'm using bodged SD200s and a 30g NiMH pack, so they could maybe save 20g or so...
And I'm sure walkers cuold be made for the 150g weight too, but they get extra weight for being abnormal, so why not allow extras for autonomous ones?
Team 'In Theory'
-
BeligerAnt

- Posts: 1872
- Joined: Wed May 15, 2002 12:00 am
- Location: Brighton
- Contact:
I really don't think we are anywhere near the stage of an autonomous bot making a realistic opponent for a human-controlled vehicle (ROV). Even given our collective experience I doubt we could realistically cram enough processing power and "intelligence" into 150g to make a machine to compete effectively against an ROV.
It would be an interesting experiment, but I think we are very much at the experimental stage. I think we need to agree some practical rules which allow autonomous robot competition, but I don't think we should go rewriting the AWS rules just yet! For now, we need to run autonomous robots alongside AWS competitions. It would be interesting to run a fully-autonomous competition and a "mixed" competition to see what happens.
The reason for the extra weight limit in walkers is (historically) because of the increased mechanical complexity of the walking mechanism. Personally I think 75g is rather generous and some people have taken advantage of this to add heavier disks than would be possible to fit into a 150g roller. (Not that I'm saying they shouldn't!)
Walkers also have the disadvantage of having to walk, and generally have less traction than rollers because they have to lift their legs off the floor. It is quite easy for a 150g roller to push a 225g walker (apart from SmartAnt3 when it stands still!). The same would not be true of a 225g roller.
If autonomous robots come out around 250g then let them compete against SuperAnts.
It would be an interesting experiment, but I think we are very much at the experimental stage. I think we need to agree some practical rules which allow autonomous robot competition, but I don't think we should go rewriting the AWS rules just yet! For now, we need to run autonomous robots alongside AWS competitions. It would be interesting to run a fully-autonomous competition and a "mixed" competition to see what happens.
The reason for the extra weight limit in walkers is (historically) because of the increased mechanical complexity of the walking mechanism. Personally I think 75g is rather generous and some people have taken advantage of this to add heavier disks than would be possible to fit into a 150g roller. (Not that I'm saying they shouldn't!)
Walkers also have the disadvantage of having to walk, and generally have less traction than rollers because they have to lift their legs off the floor. It is quite easy for a 150g roller to push a 225g walker (apart from SmartAnt3 when it stands still!). The same would not be true of a 225g roller.
If autonomous robots come out around 250g then let them compete against SuperAnts.
Gary, Team BeligerAnt
-
peterwaller

- Posts: 3213
- Joined: Fri Feb 15, 2002 12:00 am
- Location: Aylesbury Bucks
- Contact:
I am hopeing to restart my autonomous robot again in the new year. So far I have just been plying with an optical sensing system trying to make them more directional and increase the range. I had just got to the stage where I needed to add some modulation so I think I will invest in that Sharp chip that Gary mentioned. As for the rules we probably need to get a couple up and running before we know how much size and weight will need to be allowed if any to both make them competetive and encorouge people to build them. One practical problem is how to start them off. Initially I was going to still build in radio control and use the fourth channel to switch to automation. This way you can start them off once the lid is closed and also regain control if anything should go wrong.
-
peterwaller
- Posts: 3213
- Joined: Fri Feb 15, 2002 12:00 am
- Location: Aylesbury Bucks
- Contact:
One thing we may need to look into is how we distinguish between our reflected signals from the barriers and the other robot. A sumo arena could have no sides but if we go for full combat we might need transparent or slopeing walls. Also we may well be detecting the signals from the other robot so that might actually make it easier. Maybe a ruling on stealth measures would be good but I wouldn't want to have to draft it.
-
BeligerAnt
- Posts: 1872
- Joined: Wed May 15, 2002 12:00 am
- Location: Brighton
- Contact:
I have the same worry about reflections from the enclosure walls. Perhaps we should start with sumo and no enclosure? Full combat could cause problems without resorting to a huge enclosure...
I think the minisumo rules prohibit deliberate jamming, but allow "passive" stealth methods. I think they also allow "confusion" tactics.
I think the minisumo rules prohibit deliberate jamming, but allow "passive" stealth methods. I think they also allow "confusion" tactics.
Gary, Team BeligerAnt
-
Andrew_Hibberd
- Posts: 1134
- Joined: Tue Jan 20, 2004 12:00 am
- Location: London
- Contact:
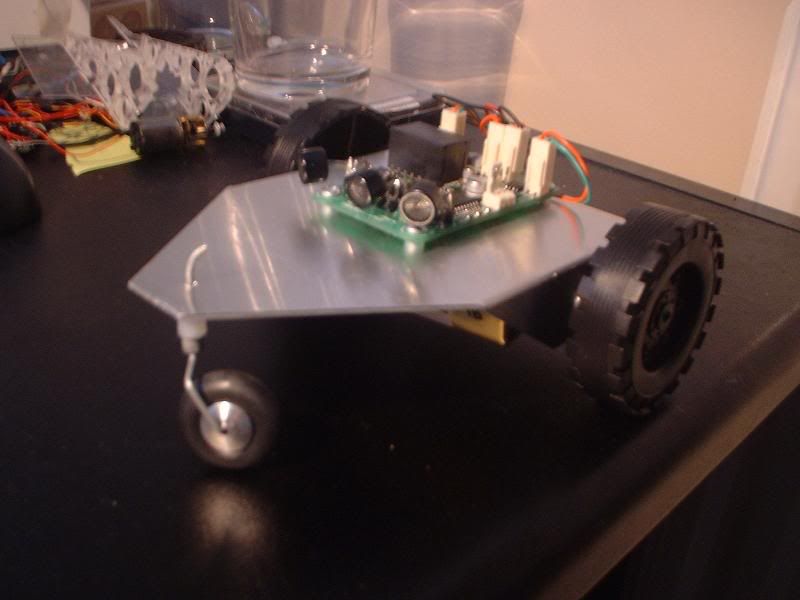
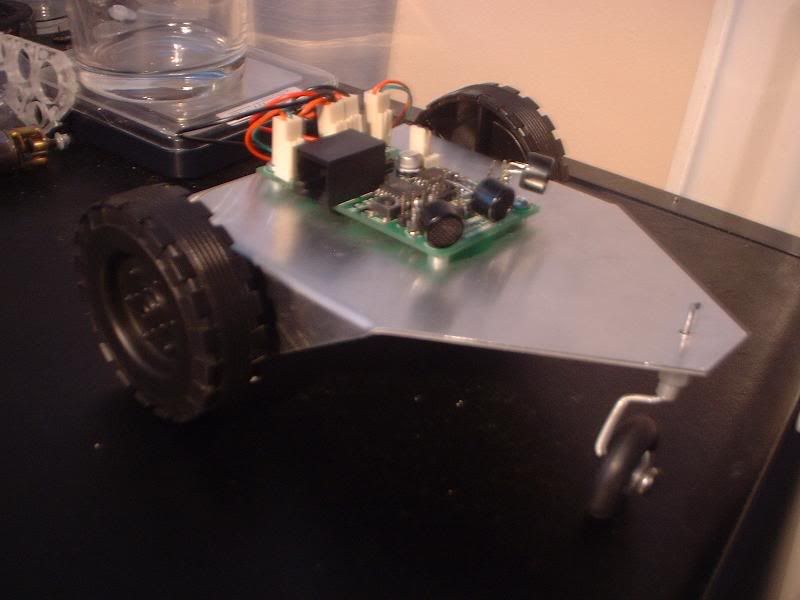
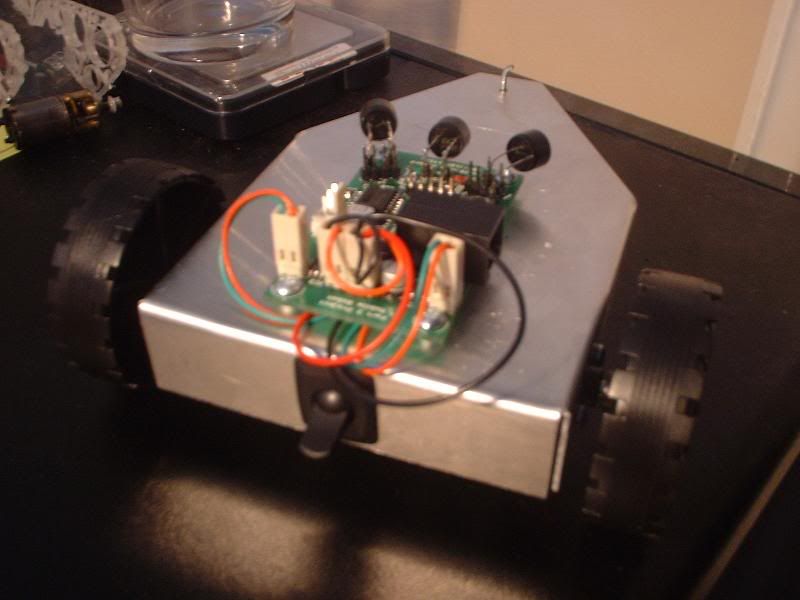
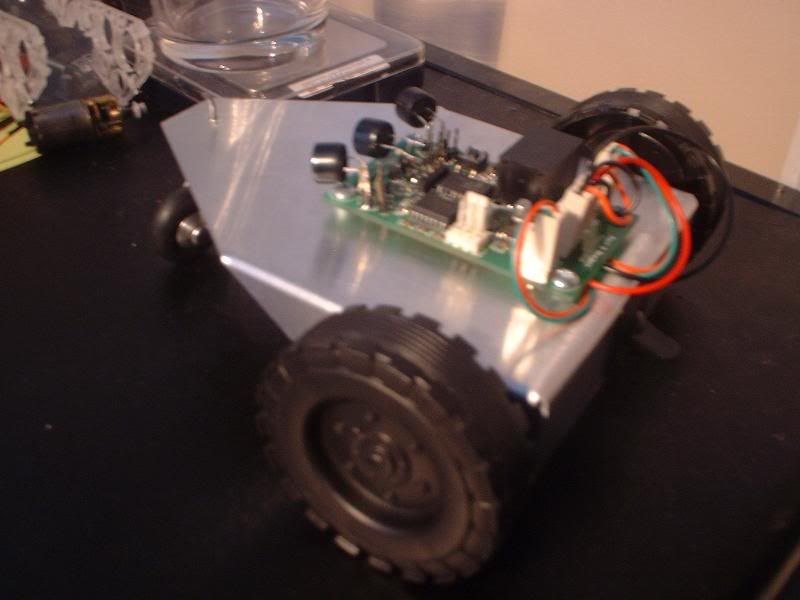
I now have an autonomous robot, will be programming it in the next few weeks. I will bring what i have to AWS19. It is basically a seven dwarf robot. It will also be tracked. I will be building it to the 4" cube but has any dicission been made about the weight. I plan to use a TX battery pack but this could easily be replaced with Lipos.
ATM the robot has 2 transmitting sonars and 1 reciever sonar, giving a left and right signal. I plan to add a sensor so that it can detect the edge in sumo, and currently have no intention of fighting in any sort of combat other than sumo.
Anyone else got any further?
EDIT
Pictures, as it is to the university specification, will modify the ali chassis with 4mm supports inside
http://i23.photobucket.com/albums/b352/ ... moant1.jpg
http://i23.photobucket.com/albums/b352/ ... moant2.jpg
http://i23.photobucket.com/albums/b352/ ... moant3.jpg
http://i23.photobucket.com/albums/b352/ ... moant4.jpg
Current weight 300g, the motors are 50g each, loads of places to save weight so if it needs to be 150g i can take alot out.
ATM the robot has 2 transmitting sonars and 1 reciever sonar, giving a left and right signal. I plan to add a sensor so that it can detect the edge in sumo, and currently have no intention of fighting in any sort of combat other than sumo.
Anyone else got any further?
EDIT
Pictures, as it is to the university specification, will modify the ali chassis with 4mm supports inside
http://i23.photobucket.com/albums/b352/ ... moant1.jpg
{kind=link}
http://i23.photobucket.com/albums/b352/ ... moant2.jpg
{kind=link}
http://i23.photobucket.com/albums/b352/ ... moant3.jpg
{kind=link}
http://i23.photobucket.com/albums/b352/ ... moant4.jpg
{kind=link}
Current weight 300g, the motors are 50g each, loads of places to save weight so if it needs to be 150g i can take alot out.
TEAM GEEK!
-
BeligerAnt
- Posts: 1872
- Joined: Wed May 15, 2002 12:00 am
- Location: Brighton
- Contact:
Cool!
I have built my PIC processor board and some IR sensors for edge and opponent detection.
I now need to program/debug the board and put everything together.
Drive is 2 standard servos, using the PIC to generate R/C-type control pulses.
I was aiming at the minisumo rules, 4" square footprint, and a whopping 500g weight limit. Most of the weight will have to be batteries and ballast, unless I use a lead chassis! I should be able to get the weight down to 250g with "normal" batteries, but I don't think I'll get to 150g.
I should be able to get the weight down to 250g with "normal" batteries, but I don't think I'll get to 150g.
Anyone else made any progress?
I have built my PIC processor board and some IR sensors for edge and opponent detection.
I now need to program/debug the board and put everything together.
Drive is 2 standard servos, using the PIC to generate R/C-type control pulses.
I was aiming at the minisumo rules, 4" square footprint, and a whopping 500g weight limit. Most of the weight will have to be batteries and ballast, unless I use a lead chassis!
Anyone else made any progress?
Gary, Team BeligerAnt
-
Andrew_Hibberd
- Posts: 1134
- Joined: Tue Jan 20, 2004 12:00 am
- Location: London
- Contact:
The problem i have found so far is that this is i have just built this robot, given a box of bits and said build this. Building can be fun but designing and driving are the best bits of ants, so am going to redesign this one for the 10cm footprint, 500g is easy. I will see about getting some copals for drive and replace the OTT ali chassis. Would quite like to design my own board sometime with more sensors. I belive that this could be used as a super ant at the next RRC, if i can an ant at the aws 
TEAM GEEK!