I am starting to rekindle my interest in autonomous robots and have decided to try my hand at a microsumo.
These are 50 mm cube but it has to fit in the position it starts in and 100 gms total weight.
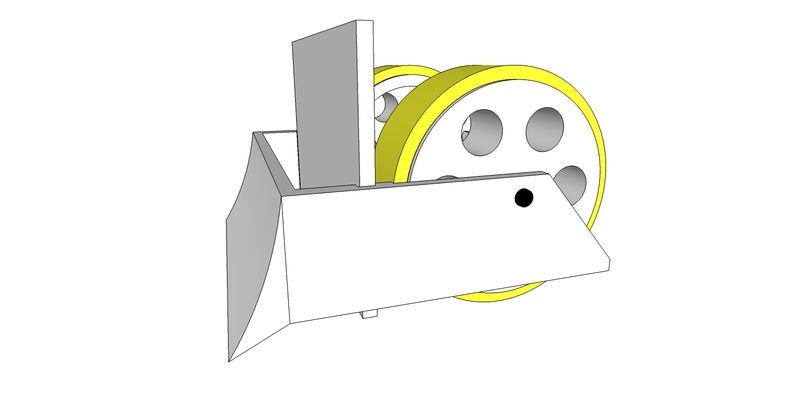
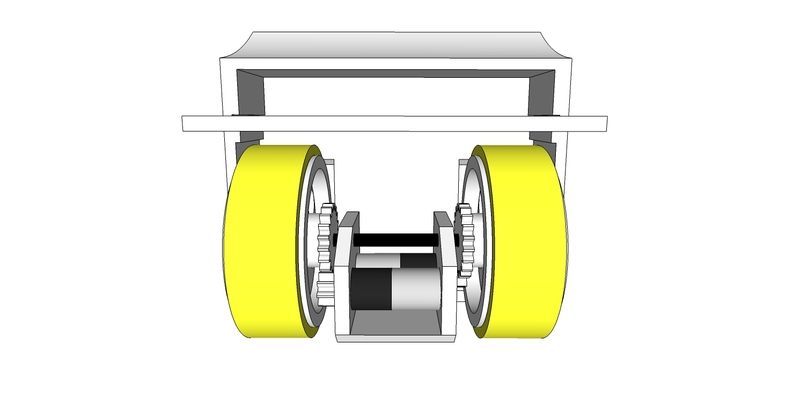
Here are a couple of shots of the cad.
Side view:
From above:
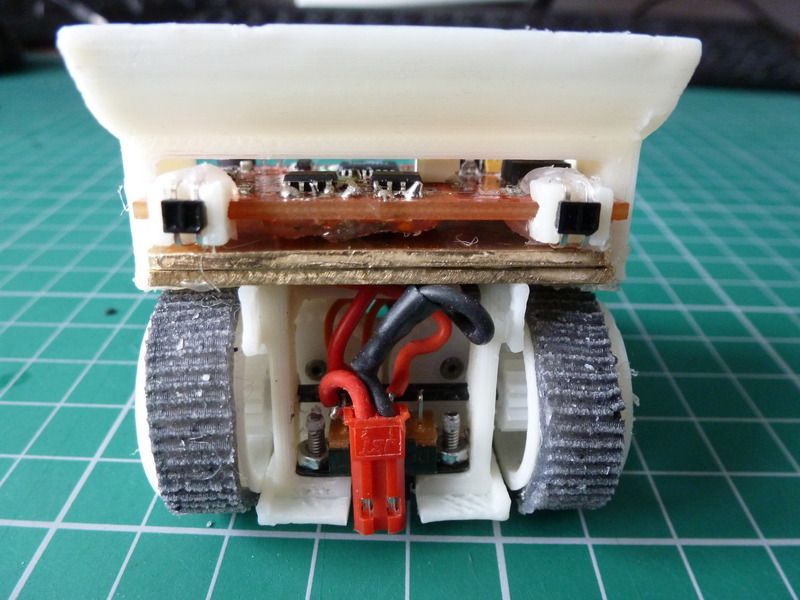
The vertical PCB means the opponent detection sensors and the edge detection sensors can all fit on the same board.
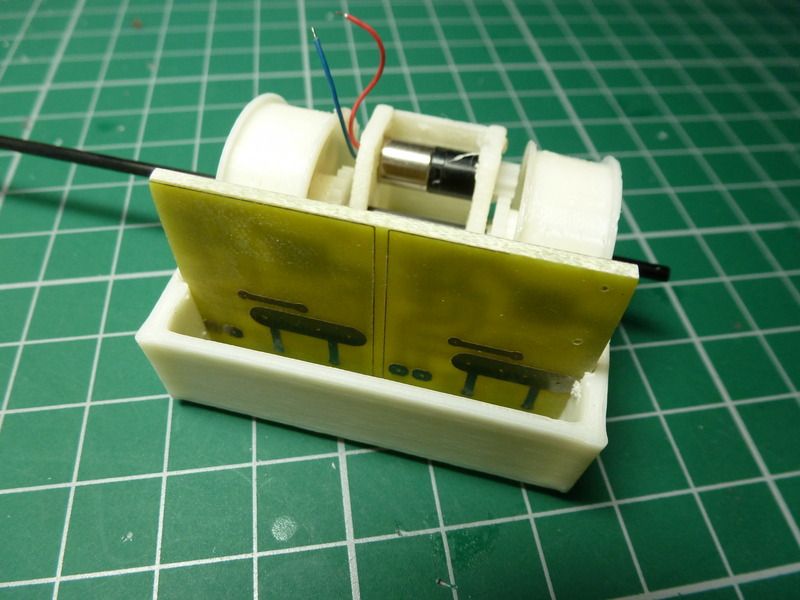
Here is the basic chassis and wheels with a mock up piece of PCB.
I have just finished the PCB layout and sent it to Ragworm for manufacture today.
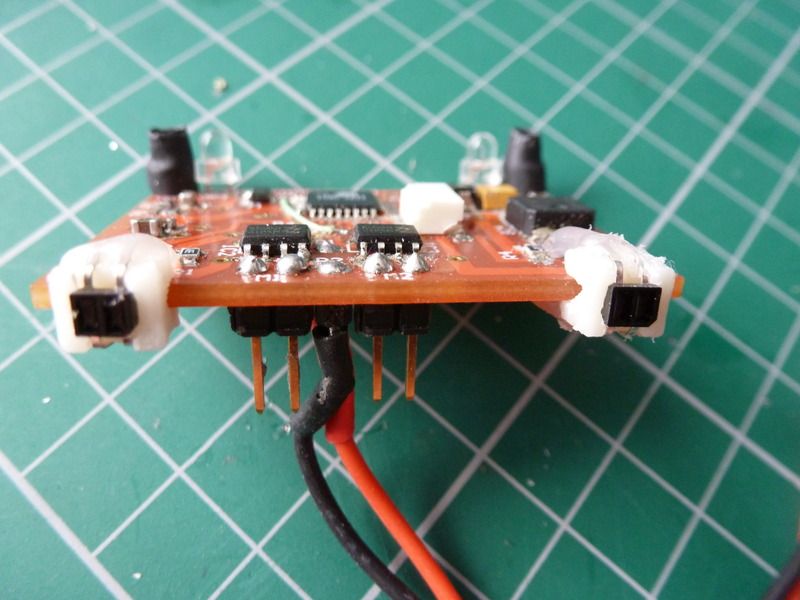
Board arrived Saturday morning and is now built up and working.
A couple of errors crept in I put the second motor on Timer 1 which turned out to be the 16 bit timer so I had to fit a couple of links to get it on Timer 2.
Also on the new pad layout I created to enable the edge detectors to be mounted at right angles I got a couple of pads swapped so I printed some small holders that enabled a little leeway in how it was connected.
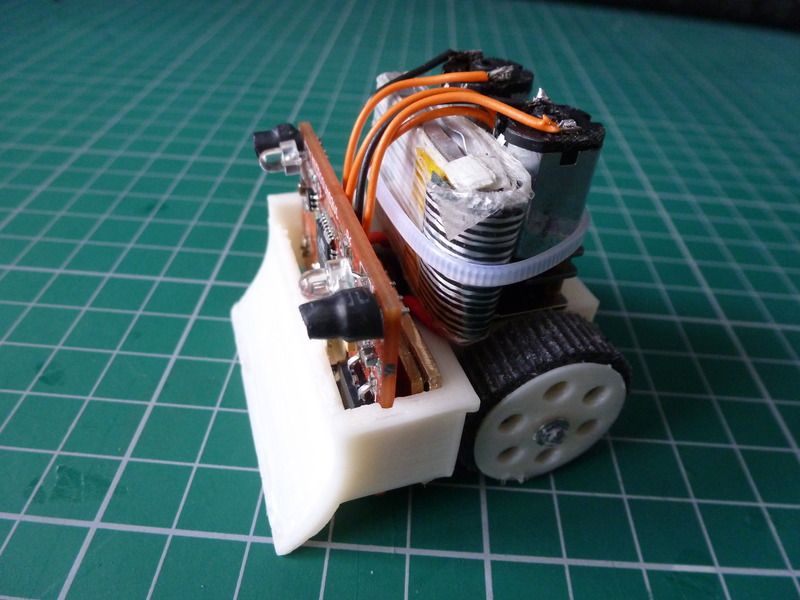
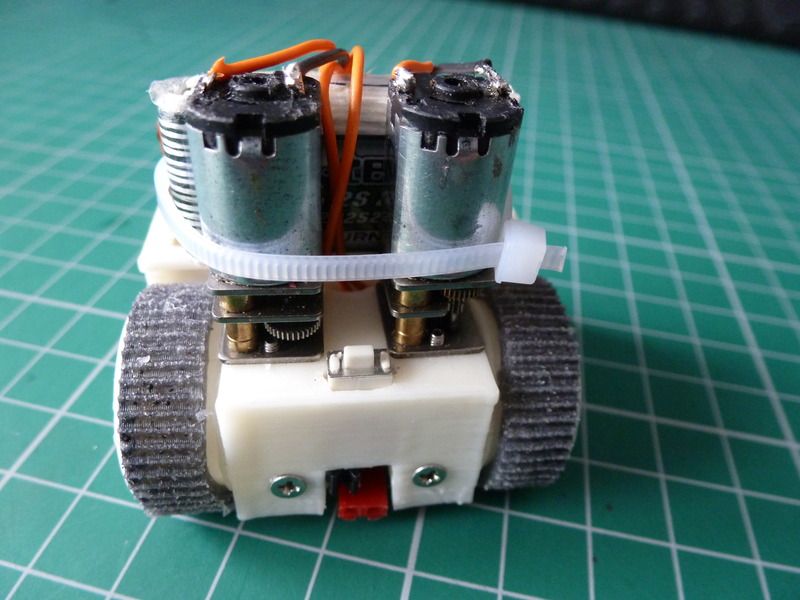
The small 6 mm motor gearboxes didn't seem to have enough power so I have reverted to the standard antweight units.
To get them in the 50 mm cube I had to mount them vertically which does make it a little top heavy.
Here is the hardware still 30 gms under weight even when carrying 20 gms of brass plates.
I managed to hack the software from one of my mini sumo's to get it moving with the edge detectors working but I haven't looked at the opponent detectors yet. https://youtu.be/zmCEVsl6dkk
Normally these will fight in a much smaller arena.
I have done alright in the past as they don't rely on me to drive them but I will be competing at the Birmingham City Uni on the 24th June with the mini sumo for the first time in 6 years. My 3 mini's are more or less the same as before except for better tyres and a new chassis for Insumountable so they may well be outstripped by newer designs. The Micro will if there are any others there take part but I just don't know if there are any about.
Here is the finished micro in a micro sizes arena it seems to work OK but does suffer from tunnel vision. https://youtu.be/B82rcX7LU3s
Yes I think you are right I chose the LED's and sensors to be narrow beam (30 degrees) to try and get more range but with the smaller arena that may not be as important.