Just bought 5 of the MG90S servo's for £9.55 with free delivery.
Ordered them Thursday afternoon and they arrived this morning and all work fine.
http://www.ebay.co.uk/itm/261214133155? ... EBIDX%3AIT
Cheap components for an antweight class
Moderators: BeligerAnt, petec, administrator
-
peterwaller

- Posts: 3213
- Joined: Fri Feb 15, 2002 12:00 am
- Location: Aylesbury Bucks
- Contact:
-
peterwaller
- Posts: 3213
- Joined: Fri Feb 15, 2002 12:00 am
- Location: Aylesbury Bucks
- Contact:
Re: Cheap components for an antweight class
They are surprisingly easy to modify to full rotation.
Remove the four screws.
Take off the gearbox cover.
Pull the output gear off the shaft this is quite a tight fit so needs a bit of pulling.
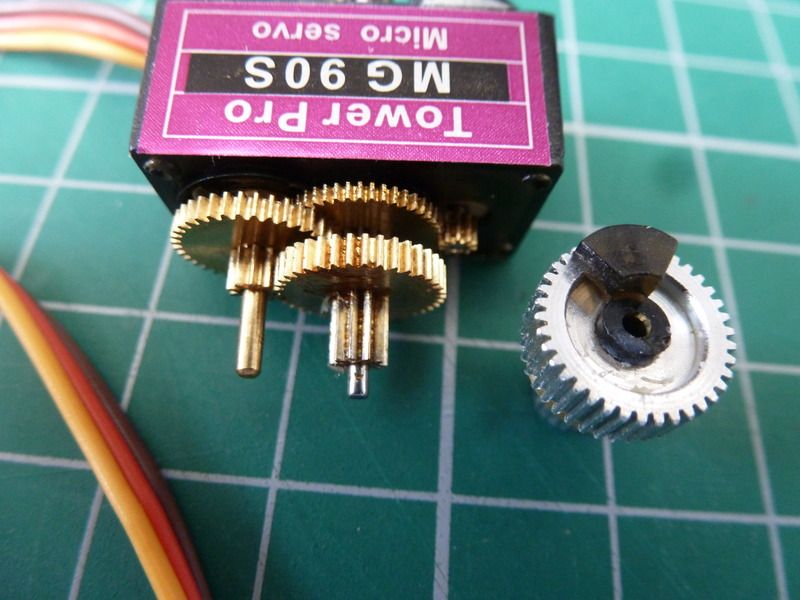
The output gear has a plastic insert that runs on the shaft and acts as an end stop so you need to cut off the end stop part while leaving the centre as below.
Drill out the plastic insert to 1.4 mm so it runs freely on the brass coloured shaft which is the feedback pot shaft.
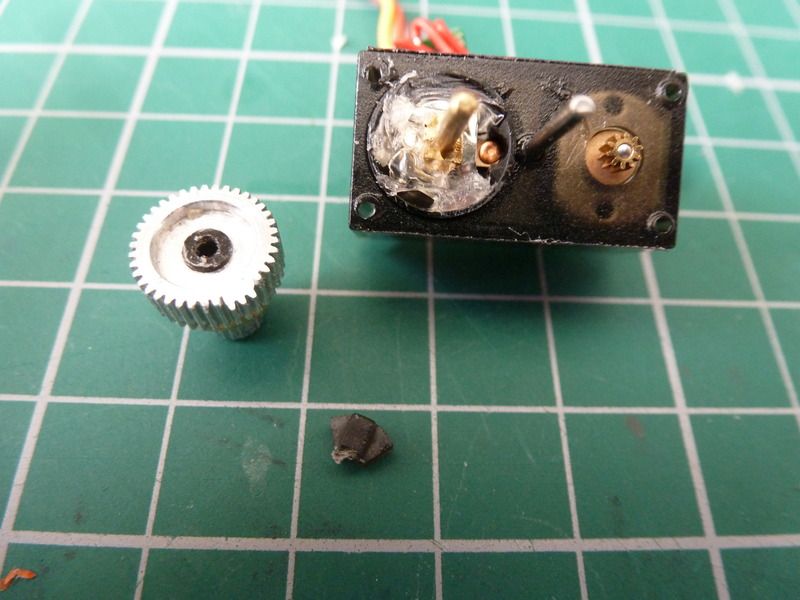
Remove all the gears and plug the servo in to a receiver on the aileron channel and make sure it runs.
Then with the stick and trims centered adjust the pot shaft until the motor is stopped.
Put a enough hot melt glue into the pot mechanism as above to ensure it can't move but careful to clean any off the shaft.
Replace the gears and gearbox cover and ensure it all runs when connected to the receiver.
Replace the four screws.
You will find there is quite a lot of end float on the output shaft so I printed some small washers 7.3mm OD, 5.6mm ID and 0.7mm thick and placed it over the output shaft between the final gear and the plain metal bearing to reduce this.
Remove the four screws.
Take off the gearbox cover.
Pull the output gear off the shaft this is quite a tight fit so needs a bit of pulling.
The output gear has a plastic insert that runs on the shaft and acts as an end stop so you need to cut off the end stop part while leaving the centre as below.
Drill out the plastic insert to 1.4 mm so it runs freely on the brass coloured shaft which is the feedback pot shaft.
Remove all the gears and plug the servo in to a receiver on the aileron channel and make sure it runs.
Then with the stick and trims centered adjust the pot shaft until the motor is stopped.
Put a enough hot melt glue into the pot mechanism as above to ensure it can't move but careful to clean any off the shaft.
Replace the gears and gearbox cover and ensure it all runs when connected to the receiver.
Replace the four screws.
You will find there is quite a lot of end float on the output shaft so I printed some small washers 7.3mm OD, 5.6mm ID and 0.7mm thick and placed it over the output shaft between the final gear and the plain metal bearing to reduce this.
-
UserFriendly

- Posts: 119
- Joined: Wed Feb 18, 2015 3:52 pm
Re: Cheap components for an antweight class
Looks good Pete, however, the teeth in your image seem to stick out, is that a problem?:

Andy B - Team UserFriendly
Reading Cybernetics Graduate 1996
Trying not to take Antweights too seriously. I think I'm failing.
First AWS was 46.
Reading Cybernetics Graduate 1996
Trying not to take Antweights too seriously. I think I'm failing.
First AWS was 46.
-
UserFriendly
- Posts: 119
- Joined: Wed Feb 18, 2015 3:52 pm
Re: Cheap components for an antweight class
...actually, I think I see it. Those teeth are shorter aren't they?
Andy B - Team UserFriendly
Reading Cybernetics Graduate 1996
Trying not to take Antweights too seriously. I think I'm failing.
First AWS was 46.
Reading Cybernetics Graduate 1996
Trying not to take Antweights too seriously. I think I'm failing.
First AWS was 46.
-
peterwaller
- Posts: 3213
- Joined: Fri Feb 15, 2002 12:00 am
- Location: Aylesbury Bucks
- Contact:
Re: Cheap components for an antweight class
Yes they are shorter that is where the plastic end stop was.