going to start a build diary for the next version of Pop!
I think i may as well try something crazy seeing as it will be several months until the next aws after brighton so i'm working on a custom pneumatic set up.
Plan is to have a 20mm bore ram, with 10mm ports so a ridiculously high flow and a full buffer tank and primary tank system. The ram, valve and buffertank will be one solid combined piece with a thinner port tubing into the buffer from the main tank where a high flow rate is not as important.
I plan to build the pneumatic system first and then design around it with the weight I have left which will be minimal...
I'm going to buy a small axminster lathe early next week, as soon as the bank is open to put enough cash in my account, and then start asap on a full aluminium set up 8)
Hopefull will get some basic CAD designs up this evening.
Pop!
Moderators: BeligerAnt, petec, administrator
Pop!
RPD International
www.RPDintl.com
www.RPDintl.com
Done a bit on the current pop! build for aws33 today, nothing major, dycem, soldering, countersinking and some testing...
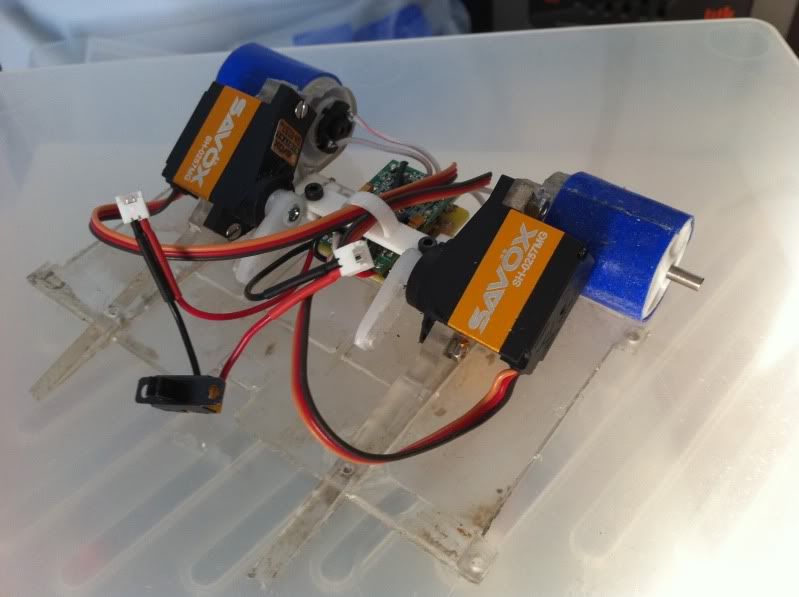
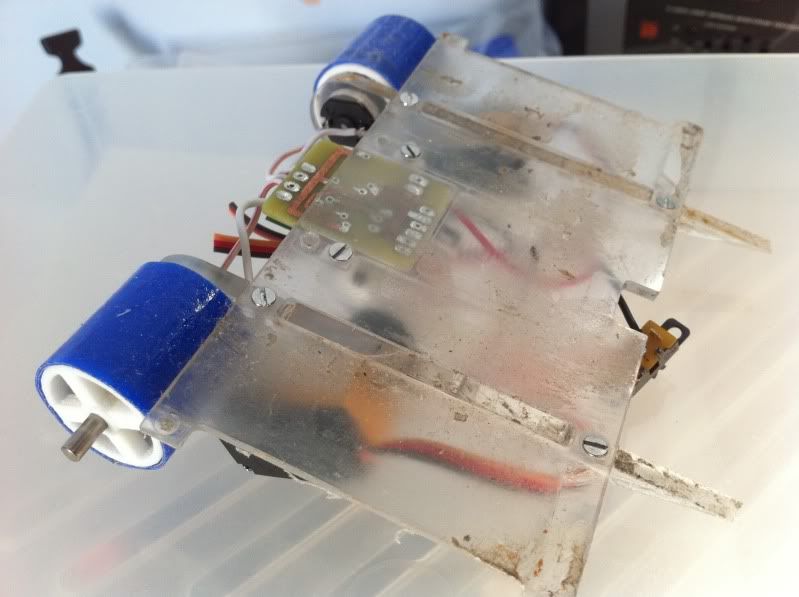
All the bolts are countersunk flush with the base as the wheels are only 18mm dia so ground clearence is minimal:
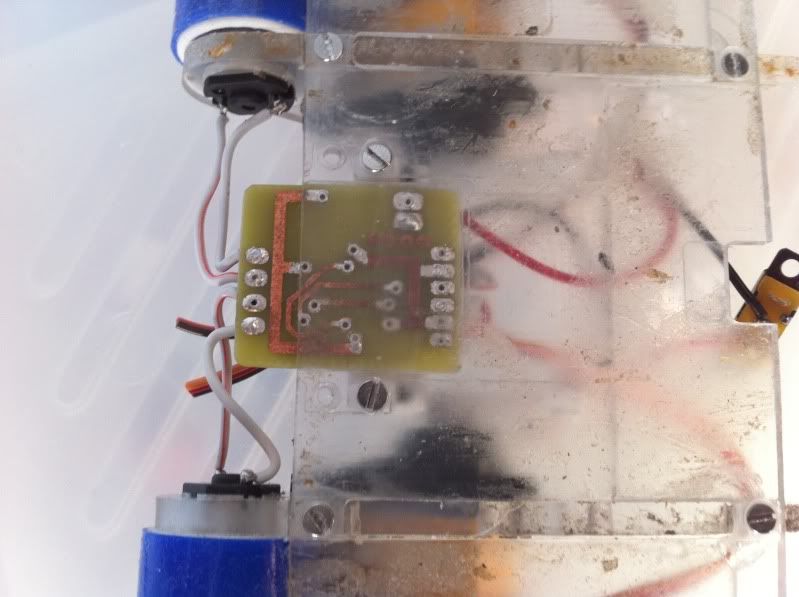
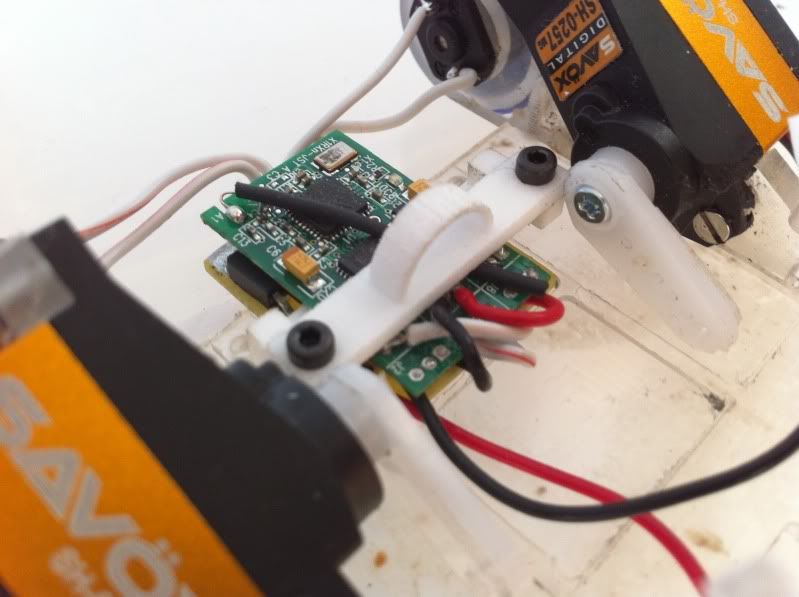
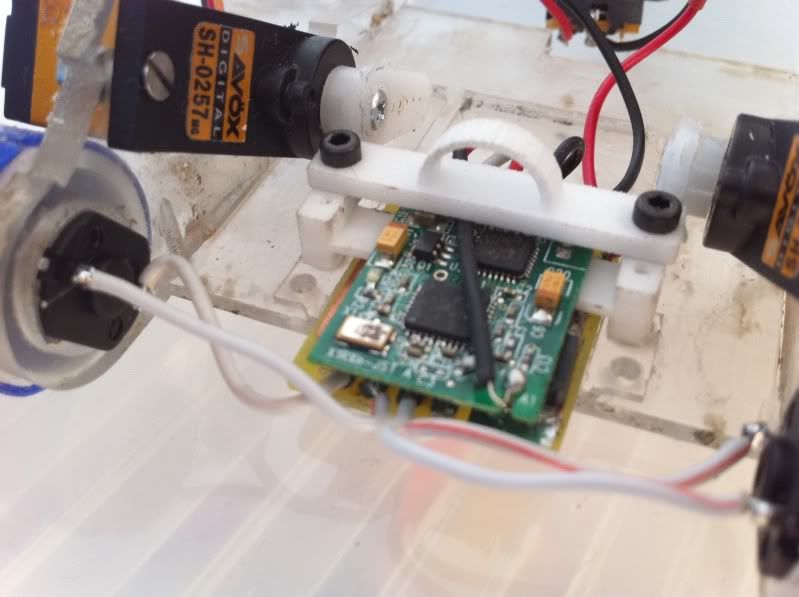
The controller and receiver module is held together with a 3d printed cradle and is fixed into a secure pocket milled in the base:
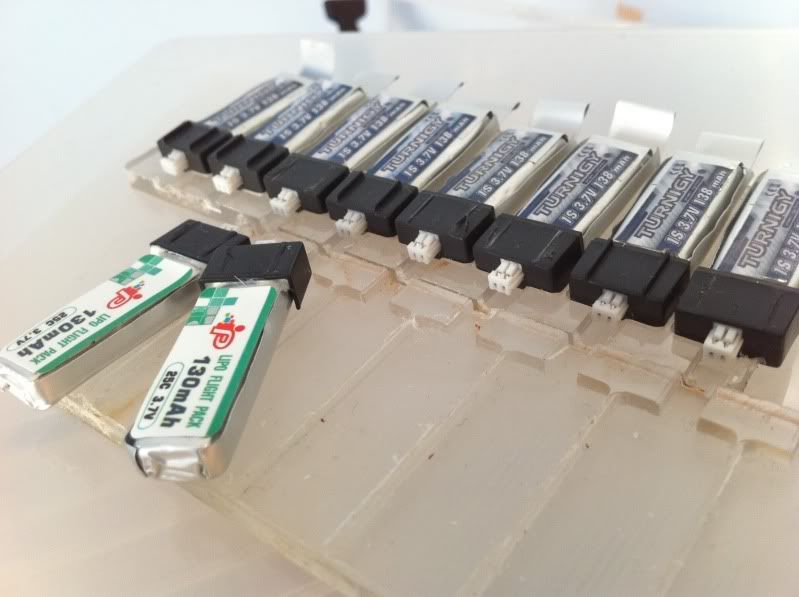
and i really do waste my time... cnc'd battery cradles:
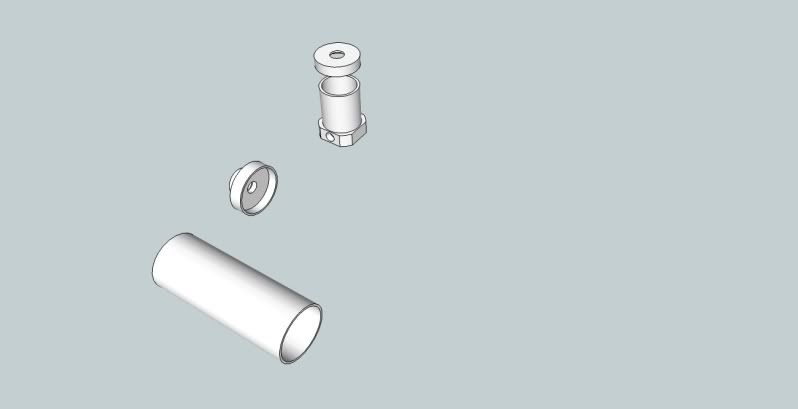
Meanwhile i've started mocking up the pneumatic system, main focus atm is how its all going to fit together without leaks... trying to work out how to connect a soft pipe between the main tank and buffer tank, any sudgestions?
All the bolts are countersunk flush with the base as the wheels are only 18mm dia so ground clearence is minimal:
The controller and receiver module is held together with a 3d printed cradle and is fixed into a secure pocket milled in the base:
and i really do waste my time... cnc'd battery cradles:
Meanwhile i've started mocking up the pneumatic system, main focus atm is how its all going to fit together without leaks... trying to work out how to connect a soft pipe between the main tank and buffer tank, any sudgestions?
RPD International
www.RPDintl.com
www.RPDintl.com
-
joey_picus

- Posts: 1137
- Joined: Tue Jan 13, 2009 1:51 pm
- Location: Lancaster, Lancashire
- Contact:
I think you might have to talk to Andy Hibberd about that, I know he's got his full pressure pneumatic system half built and that's made of just a few pieces.
The current version looks good so far and i'm ever so slightly jealous looking forward to seeing it in Brighton.
looking forward to seeing it in Brighton.
The current version looks good so far and i'm ever so slightly jealous
Joey McConnell-Farber - Team Picus Telerobotics - http://picus.org.uk/ - @joey_picus
"These dreams go on when I close my eyes...every second of the night, I live another life"
"These dreams go on when I close my eyes...every second of the night, I live another life"
Well if he can improve on my current 15 or 16 odd piece setup then i need to know lol
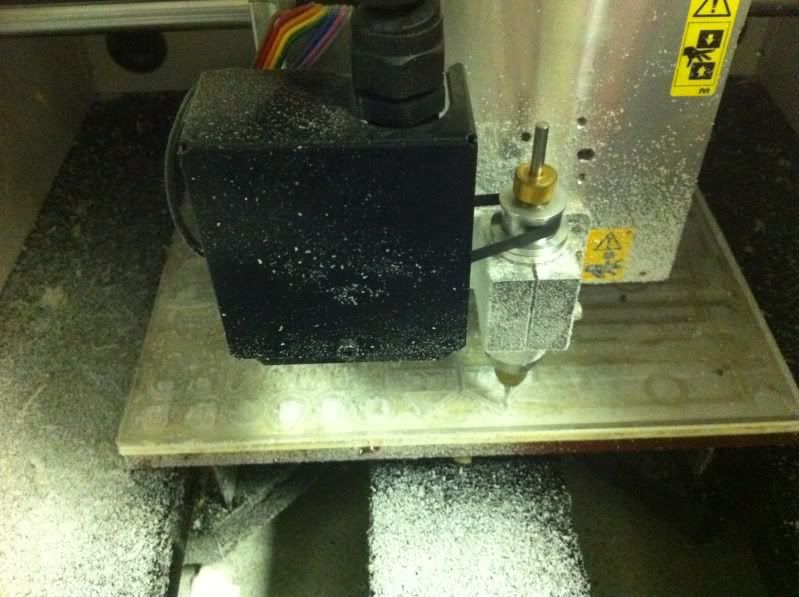
I'm currently babysitting the cnc... 3 more passes to go before i can take these out and go get dinner!
I'm currently babysitting the cnc... 3 more passes to go before i can take these out and go get dinner!
RPD International
www.RPDintl.com
www.RPDintl.com
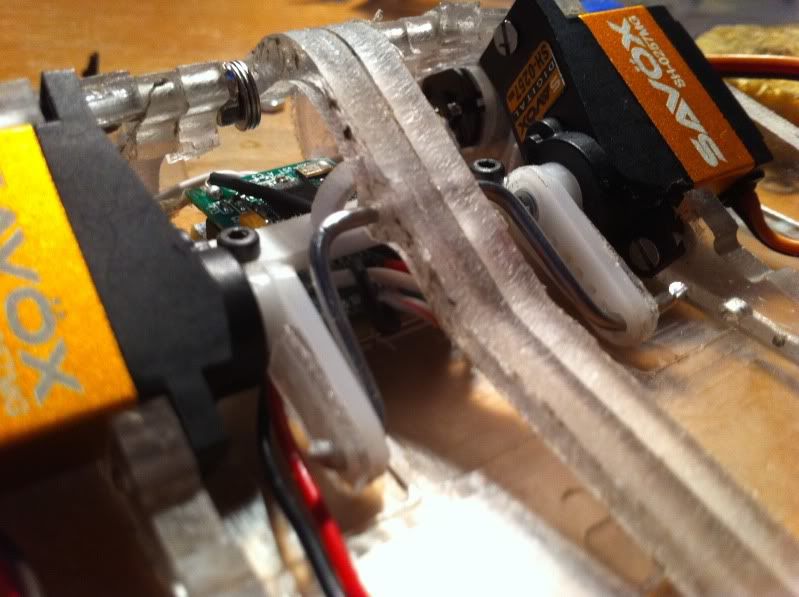
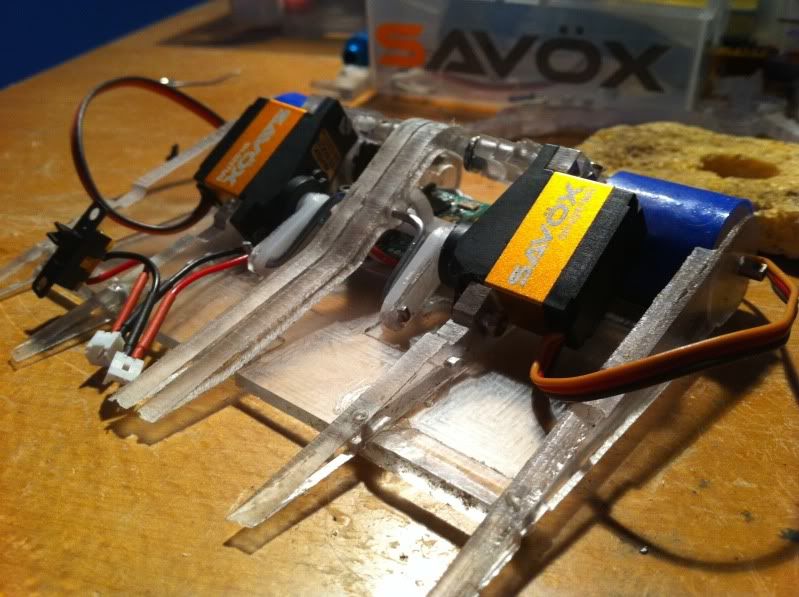
well after 5 hours machine sitting and several cock ups i've got all the pieces for the current pop cut out and been offered to rent the cnc machine for a term so looks like the next pop will definately be ridiculous;) few more pictures...

and a few quick sketches of how the pneumatic system should work, although i doubt they make sense to anyone but myself due to the strange way i work in which i only write down half the things and remember the rest...
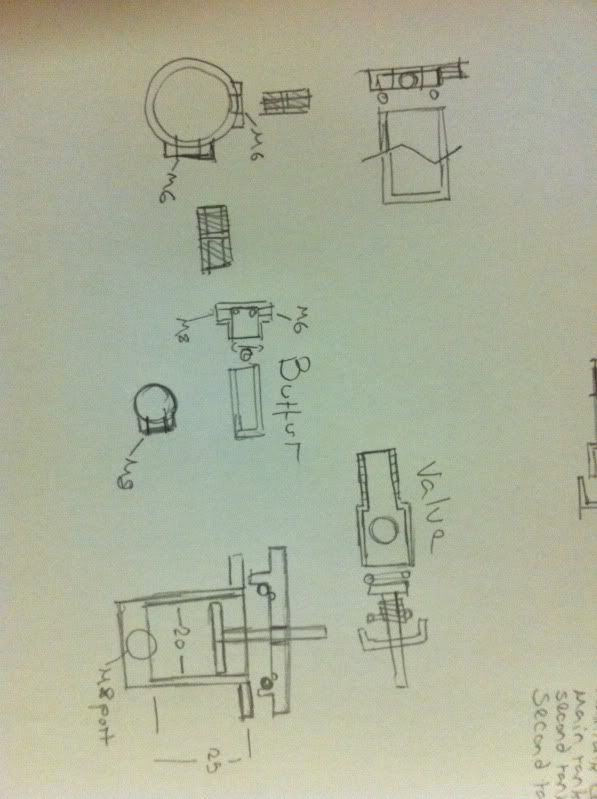
on second thoughts that looks like a childs drawing...
and a few quick sketches of how the pneumatic system should work, although i doubt they make sense to anyone but myself due to the strange way i work in which i only write down half the things and remember the rest...
on second thoughts that looks like a childs drawing...
RPD International
www.RPDintl.com
www.RPDintl.com
-
Remote-Controlled Dave
- Posts: 3716
- Joined: Sun Apr 03, 2005 5:30 pm
- Location: Antrim, Northern Ireland
- Contact:
I'm interested to know, from Josh if you've tried, or from someone else. Is having two servos on the lifting arm just a gimmick? Or will it actually make a difference?
Cos I can imagine it being a bit more torquey maybe, but won't you have to have them completely in sync to have an effect? If there's a slight difference in mounting or elevation or whatever, won't one just hinder the other?
And we all know there's plenty enough torque in most single servos to lift another ant anyway, cos everyone else just uses one, so why not just have one? Or have two lifting arms?
Cos I can imagine it being a bit more torquey maybe, but won't you have to have them completely in sync to have an effect? If there's a slight difference in mounting or elevation or whatever, won't one just hinder the other?
And we all know there's plenty enough torque in most single servos to lift another ant anyway, cos everyone else just uses one, so why not just have one? Or have two lifting arms?
Die Gracefully Robotics
Winner - AWS 39
Winner - AWS 39
-
peterwaller

- Posts: 3213
- Joined: Fri Feb 15, 2002 12:00 am
- Location: Aylesbury Bucks
- Contact:
The more you load a servo the more it slows down until in the limit case it stalls. There will be slight differences in the speed of the servos but the faster one will take slightly more of the load until it has been slowwed to the speed of the other one. So although most servos can lift an antweight for a given load two will lift it faster and there for give a better flip.
-
Remote-Controlled Dave
- Posts: 3716
- Joined: Sun Apr 03, 2005 5:30 pm
- Location: Antrim, Northern Ireland
- Contact:
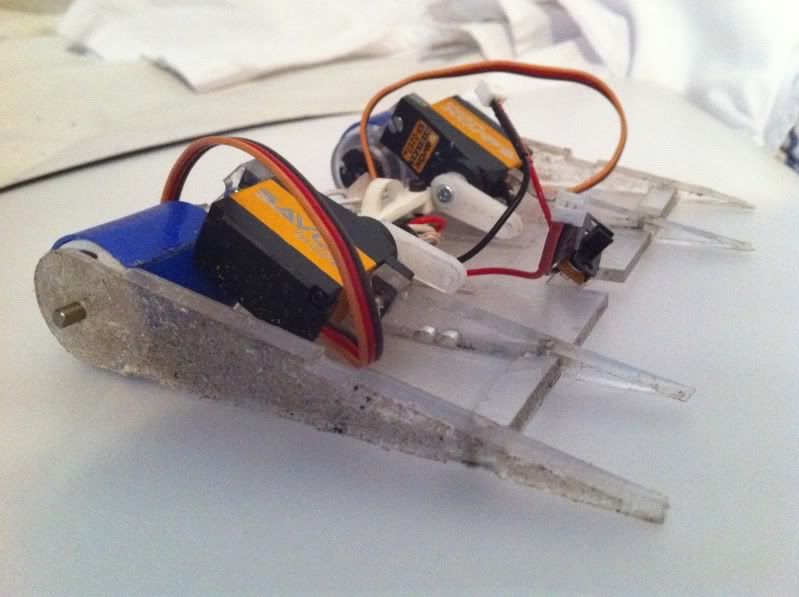
I actually chose to have two servos as i wanted it to be more symetrical  I doubt the speed difference will be apparent as these aren't quite as fast as a hpx but should be quite strong.
I doubt the speed difference will be apparent as these aren't quite as fast as a hpx but should be quite strong.
I've mounted the flipper arm, some of the back pieces weren't quite right so I've bodged it for now and will make some proper spacers when the lathe comes tomorrow. not sure if it will selfright properly though so may end up with a horrible spike on the top...

I've mounted the flipper arm, some of the back pieces weren't quite right so I've bodged it for now and will make some proper spacers when the lathe comes tomorrow. not sure if it will selfright properly though so may end up with a horrible spike on the top...
RPD International
www.RPDintl.com
www.RPDintl.com